Polar Drawbot – Informatie en onderdelen
Bouwpakket project
Polar Drawbot
Informatie (ENG):
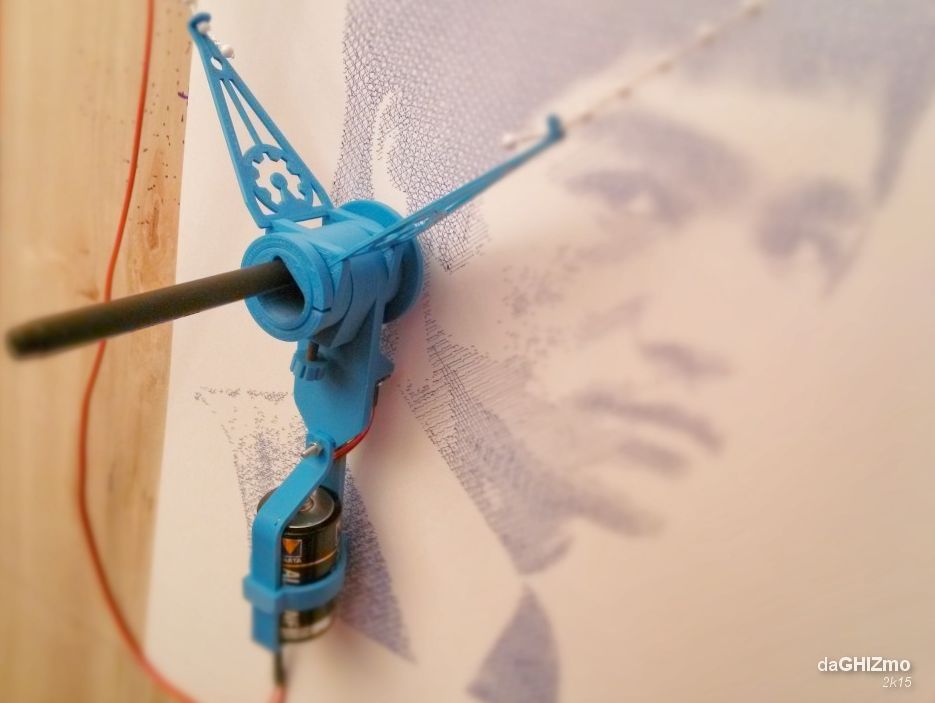
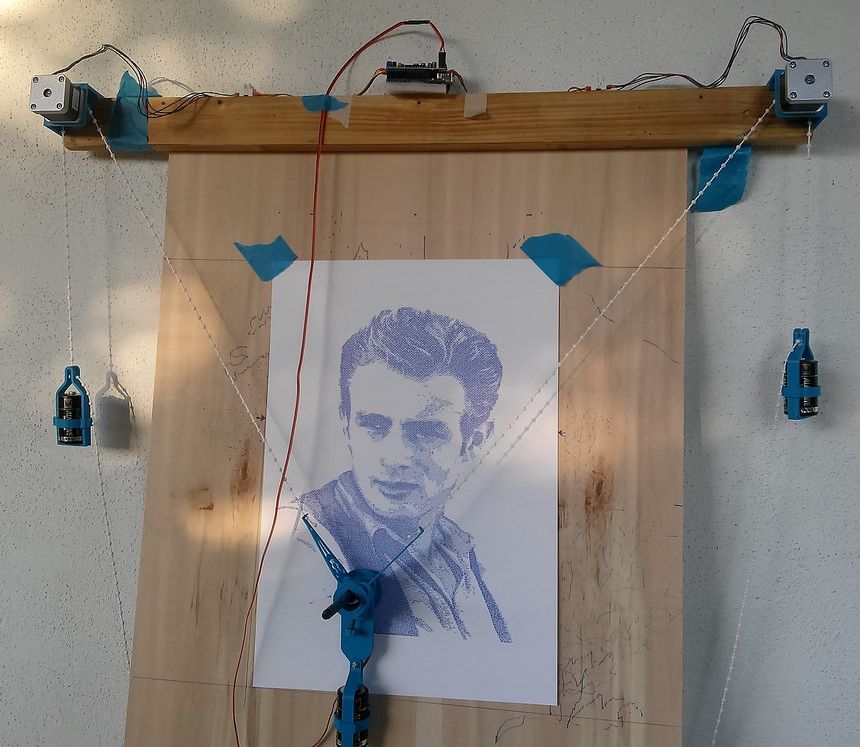
This is my redesign of mechanical parts used to build a Wallmount Polar Drawbot .
I built mine collecting and mixing various information I found available on the web.
The electronics and firmware comes from Dan Royer’s “Makelangelo project” (Makelangelo SOFTWARE – Makelangelo FIRMWARE ) using V1 version of Adafruit motor shield but I used an DK Electronics motor shield
I made several test trials using parts found ready around many projects, but none seem to match the requirements I would like to obtain.
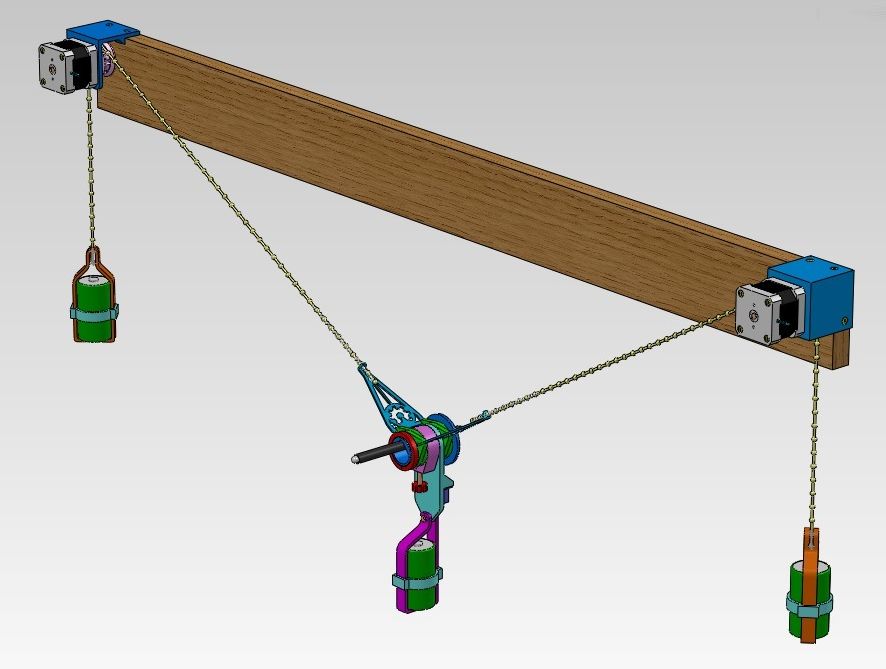
So I completely redesign all parts.
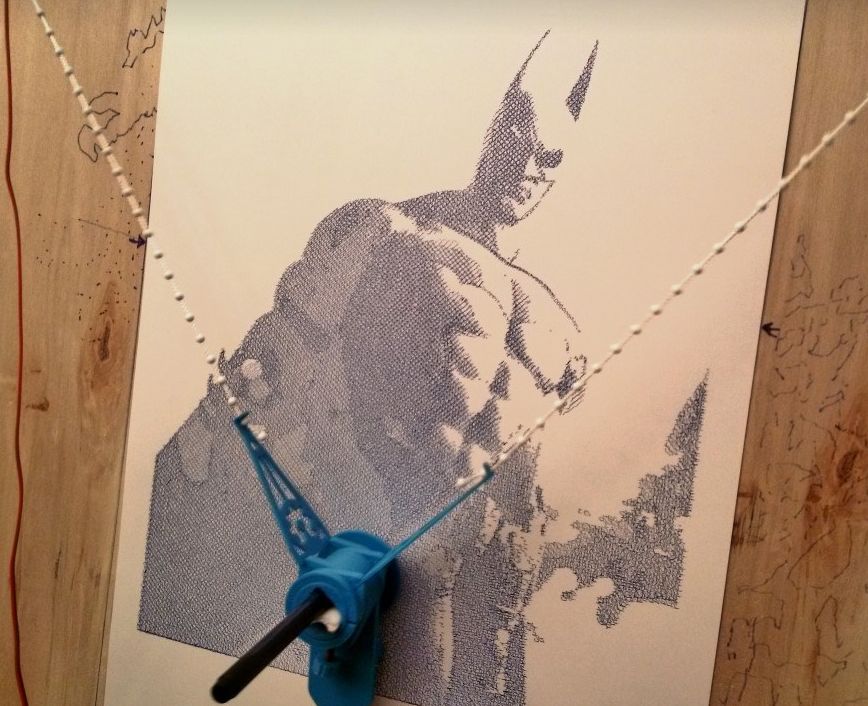
Following several tests I developed 3 kind of pulley: one is to be used for smooth cords and others for synchronous trasmission made with ball chains.
3 types of ball chain can be used: Ø 3,2 mm all metal chain with pitch of 4 mm , Ø4,4 mm plastic ball and cord with pitch 6 mm, Ø4,4 mm plastic ball and cord with pitch 12 mm
They can be used interchangeably, just remember to change pulley diameter in the machine setup or you obtain unaspected results.
Also the overall dimensions like stepper motors interaxes or drawing area can be changed at your convenience (remember also to change them in setup)
As a counterweight I used some exhausted “D” type batteries and for that I made several kind of holder to hang them.
For mechanical parts I was also inspired from some photos of Kongorilla on Flickr
In trasmission gears and the pen fixing, I used captive nuts so remember to pause the gcode and insert the nut as explained in my previous things
Foto’s