Sensor – AM312 – PIR bewegingssensor
Hardware

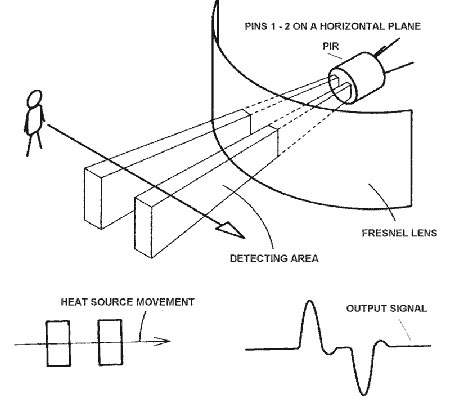
Informatie (ENG)
1. Low power consumption, small size, easy to install
2. Internal use of digital signal processing, pit interference strong
3. High sensitivity, reliability, and can be widely used in automatic sensing circuit
4. Repeatable trigger mode: that is, after the induction output is high, in the delay period, if the body in its induction range of activities, the output will remain high until the delay after the person to become Low level. (Ie, the sensing module automatically detects a delay period after each activity of the human body, and takes the last active time as the starting point for the delay time).
Technische details:
- Operating voltage: DC 2.7-12V;
- Static power consumption: <0.1mA;
- Delay time: 2 seconds;
- Block time: 2 seconds;
- Trigger mode: repeatable;
- Sensing range: ≤ 100 degrees cone angle, 3-5 meters; (according to the specific lens)
- Working temperature: -20 – + 60 ℃
- PCB Dimensions: 10mm * 8mm
- Module lens: small lens
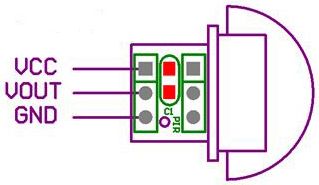
Pinout
| Pin: | Functie: |
|---|---|
| 01 | +4.5v~20v |
| 02 | OUT |
| 03 | GND |
Arduino
Sluit de module aan volgens onderstaand overzicht:

| Arduino pin: | PIR pin: |
|---|---|
| +5v | 01 (+5v) |
| D2 | 02 (OUT) |
| GND | 03 (GND) |
De OUT wordt HIGH (5v) als de PIR een detectie meet, uitlezen van de Arduino is dan vrij simpel en er is geen bibliotheek nodig.
Script
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 |
// Configureer de pin voor de LED. int ledPin = 13; // Configureer de INPUT pin van de PIR. int inputPin = 2; // Zet de pirstate op LOW, aannemend dat er geen beweging is gedetecteerd wanneer de PIR start. int pirState = LOW; // Een variabele voor de pinstatus van de PIR. int val = 0; void setup() { // Stel de digitale in- of uitgangen in. pinMode(ledPin, OUTPUT); pinMode(inputPin, INPUT); Serial.begin(9600); } void loop(){ // Uitlezen van de PIR pin, is deze hoog of laag? val = digitalRead(inputPin); // Als de PIR pin HOOG is. if (val == HIGH) { // Zet de LED aan. digitalWrite(ledPin, HIGH); if (pirState == LOW) { //De PIR is AAN. Serial.println("Beweging gedetecteerd!"); // We reageren alleen op de verandering aan de OUT pin, niet de PIR status. pirState = HIGH; } } else { // Zet de LED uit. digitalWrite(ledPin, LOW) if (pirState == HIGH){ // De PIR is UIT. Serial.println("Beweging beëindigd!"); // We reageren alleen op de verandering aan de OUT pin, niet de PIR status. pirState = LOW; } } } |
Raspberry Pi
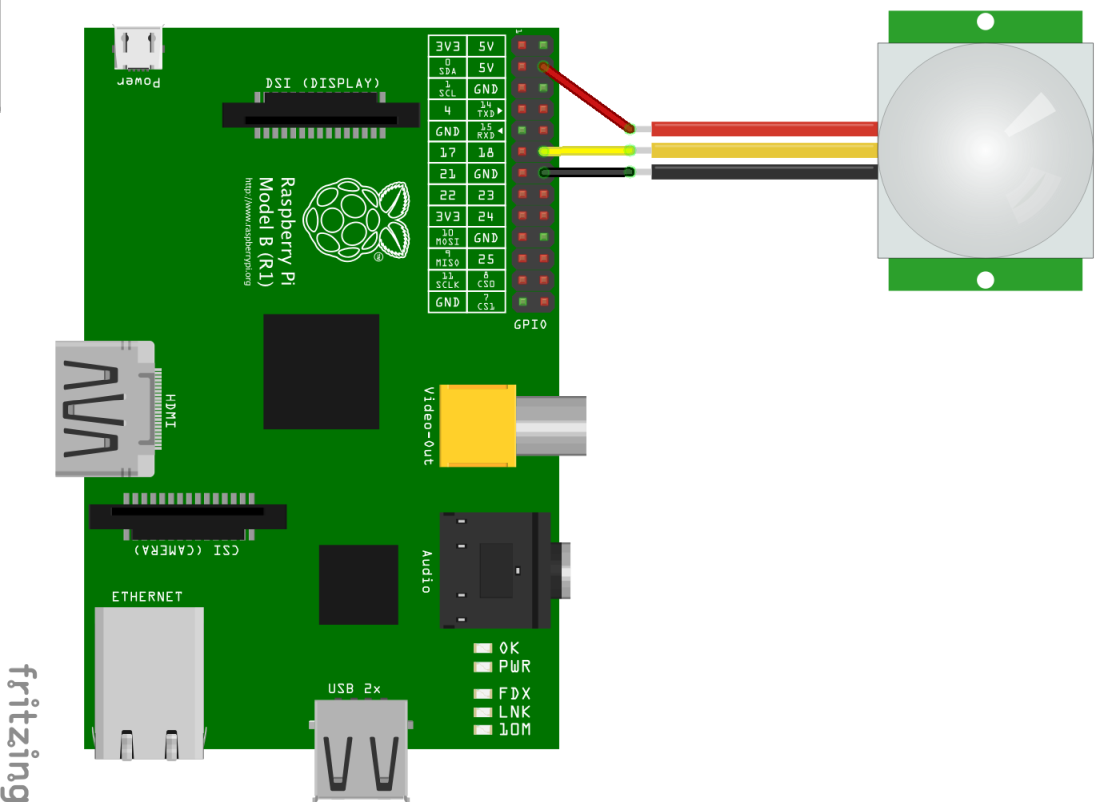
Sluit de DHT sensor aan zoals aangegeven op onderstaand schema:
| Raspberry Pi pin: | PIR pin: |
|---|---|
| +5v | 01 (+5v) |
| GPIO18 | 02 (OUT) |
| GND | 03 (GND) |
Scripts
Met onderstaande Python code kan de pin van de PIR uitgelezen worden, maak een bestand aan genaamd pir.py met deze inhoud:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 |
#!/bin/python # importeer de GPIO bibliotheek. import RPi.GPIO as GPIO # Importeer de time biblotheek voor tijdfuncties. from time import sleep # Definieer pin voor PIR pir_sensor = 18 # Zet de pinmode op Broadcom SOC. GPIO.setmode(GPIO.BCM) # Zet waarschuwingen uit. GPIO.setwarnings(False) # Zet de GPIO pin als ingang. GPIO.setup(pir_sensor, GPIO.IN) try: while True: # Wacht 1/4 van een seconde sleep(.250) # Lees de status van de GPIO pin uit. if GPIO.input(pir_sensor): # Pin is HOOG (beweging gedetecteerd). print "Beweging gedetecteerd!, GPIO status:", GPIO.input(pir_sensor) else: print "GEEN beweging, GPIO status:", GPIO.input(pir_sensor) except KeyboardInterrupt: # GPIO netjes afsluiten GPIO.cleanup() |
En start dit bestand met het commando: sudo python pir.py
Ps. Druk op CTRL+C om het script te stoppen!
Output
|
1 2 3 4 5 6 7 8 9 |
GEEN beweging, GPIO status: 0 GEEN beweging, GPIO status: 0 GEEN beweging, GPIO status: 0 Beweging gedetecteerd!, GPIO status: 1 Beweging gedetecteerd!, GPIO status: 1 Beweging gedetecteerd!, GPIO status: 1 GEEN beweging, GPIO status: 0 GEEN beweging, GPIO status: 0 GEEN beweging, GPIO status: 0 |
Voorbeeld met buzzer
Bron: pimylifeup.com
Sluit het volgende aan volgens onderstaand schema:

|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 |
#!/usr/bin/env python """ Detects motion and outputs a sound via a piezo buzzer. """ import RPi.GPIO as GPIO import time pir_sensor = 11 piezo = 7 GPIO.setmode(GPIO.BOARD) GPIO.setup(piezo,GPIO.OUT) GPIO.setup(pir_sensor, GPIO.IN) current_state = 0 try: while True: time.sleep(0.1) current_state = GPIO.input(pir_sensor) if current_state == 1: print("GPIO pin %s is %s" % (pir_sensor, current_state)) GPIO.output(piezo,True) time.sleep(1) GPIO.output(piezo,False) time.sleep(5) except KeyboardInterrupt: pass finally: GPIO.cleanup() |
En start dit bestand met het commando: sudo python pirnuzzer.py
Ps. Druk op CTRL+C om het script te stoppen!
Bronnen:
community.wolfram.com
raspberrypi-spy.co.uk
classthink.com
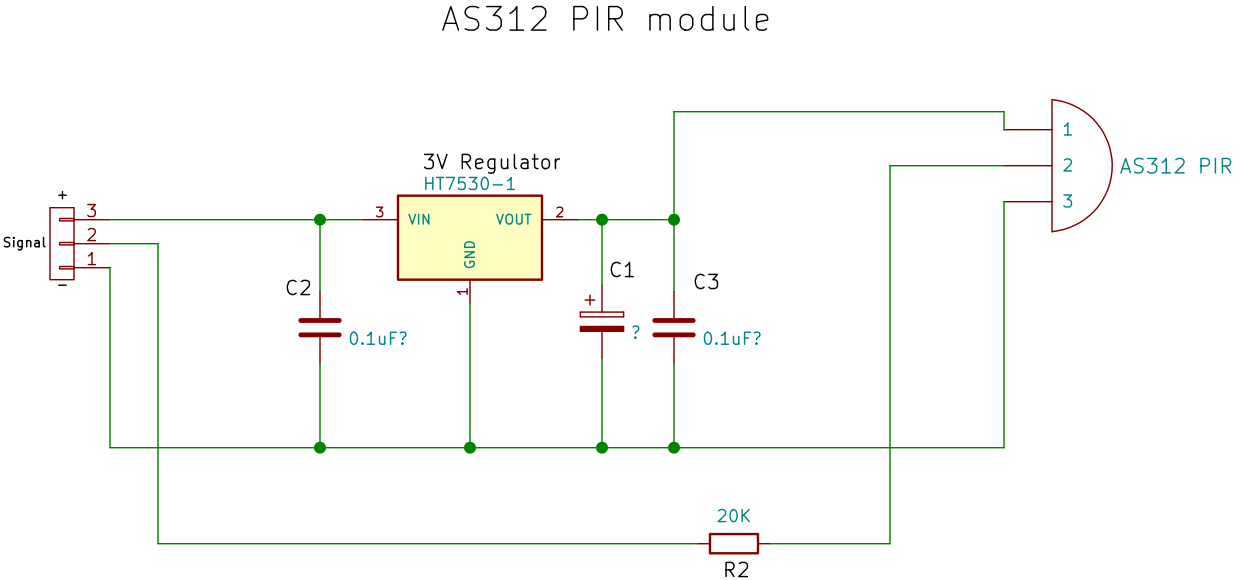
Schema
Afmetingen

Teardown
GEEN GEGEVENS
Datasheet
Fritzing
Downloads
GEEN GEGEVENS