Arduino – I2C-Bus Scanner

Wat is een I2C-bus?
De I2C-bus (spreek uit als: I kwadraat C bus), eertijds aangeduid met IIC-bus (Inter-IC-bus), is een synchrone, seriële bus, ontwikkeld voor datacommunicatie tussen microprocessoren en andere IC’s, meestal op één enkele printplaat.
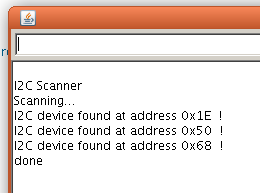
I2C Scanner (playground.arduino.cc)
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 |
// // FILE: MultiSpeedI2CScanner.ino // AUTHOR: Rob Tillaart // VERSION: 0.1.04 // PURPOSE: I2C scanner @different speeds // DATE: 2013-11-05 // URL: http://forum.arduino.cc/index.php?topic=197360 // // Released to the public domain // #include <Wire.h> #include <Arduino.h> // scans devices from 50 to 800KHz I2C speeds. // lower than 50 is not possible // DS3231 RTC works on 800 KHz. TWBR = 2; (?) long speed[] = { 50, 100, 200, 250, 400, 500, 800 }; const int speeds = sizeof(speed)/sizeof(speed[0]); // DELAY BETWEEN TESTS #define RESTORE_LATENCY 5 // for delay between tests of found devices. bool delayFlag = false; // MINIMIZE OUTPUT bool printAll = true; bool header = true; // STATE MACHINE enum states { STOP, ONCE, CONT, HELP }; states state = STOP; uint32_t startScan; uint32_t stopScan; void setup() { Serial.begin(115200); Wire.begin(); displayHelp(); } void loop() { switch (getCommand()) { case 's': state = ONCE; break; case 'c': state = CONT; break; case 'd': delayFlag = !delayFlag; Serial.print(F("<delay=")); Serial.println(delayFlag?F("5>"):F("0>")); break; case 'e': // eeprom test TODO break; case 'h': header = !header; Serial.print(F("<header=")); Serial.println(header?F("yes>"):F("no>")); break; case '?': state = HELP; break; case 'p': printAll = !printAll; Serial.print(F("<print=")); Serial.println(printAll?F("all>"):F("found>")); break; case 'q': state = HELP; break; default: break; } switch(state) { case ONCE: I2Cscan(); state = HELP; break; case CONT: I2Cscan(); delay(1000); break; case HELP: displayHelp(); state = STOP; break; case STOP: break; default: // ignore all non commands break; } } char getCommand() { char c = '\0'; if (Serial.available()) { c = Serial.read(); } return c; } void displayHelp() { Serial.println(F("\nArduino I2C Scanner - 0.1.03\n")); Serial.println(F("\ts = single scan")); Serial.println(F("\tc = continuous scan - 1 second delay")); Serial.println(F("\tq = quit continuous scan")); Serial.println(F("\td = toggle latency delay between successful tests.")); Serial.println(F("\tp = toggle printAll - printFound.")); Serial.println(F("\th = toggle header - noHeader.")); Serial.println(F("\t? = help - this page")); Serial.println(); } void I2Cscan() { startScan = millis(); uint8_t count = 0; if (header) { Serial.print(F("TIME\tDEC\tHEX\t")); for (uint8_t s = 0; s < speeds; s++) { Serial.print(F("\t")); Serial.print(speed[s]); } Serial.println(F("\t[KHz]")); for (uint8_t s = 0; s < speeds + 5; s++) { Serial.print(F("--------")); } Serial.println(); } // TEST // 0.1.04: tests only address range 8..120 // -------------------------------------------- // Address R/W Bit Description // 0000 000 0 General call address // 0000 000 1 START byte // 0000 001 X CBUS address // 0000 010 X reserved - different bus format // 0000 011 X reserved - future purposes // 0000 1XX X High Speed master code // 1111 1XX X reserved - future purposes // 1111 0XX X 10-bit slave addressing for (uint8_t address = 8; address < 120; address++) { bool printLine = printAll; bool found[speeds]; bool fnd = false; for (uint8_t s = 0; s < speeds ; s++) { TWBR = (F_CPU/(speed[s]*1000) - 16)/2; Wire.beginTransmission (address); found[s] = (Wire.endTransmission () == 0); fnd |= found[s]; // give device 5 millis if (fnd && delayFlag) delay(RESTORE_LATENCY); } if (fnd) count++; printLine |= fnd; if (printLine) { Serial.print(millis()); Serial.print(F("\t")); Serial.print(address, DEC); Serial.print(F("\t0x")); Serial.print(address, HEX); Serial.print(F("\t")); for (uint8_t s = 0; s < speeds ; s++) { Serial.print(F("\t")); Serial.print(found[s]? F("V"):F(".")); } Serial.println(); } } stopScan = millis(); if (header) { Serial.println(); Serial.print(count); Serial.print(F(" devices found in ")); Serial.print(stopScan - startScan); Serial.println(F(" milliseconds.")); } } |
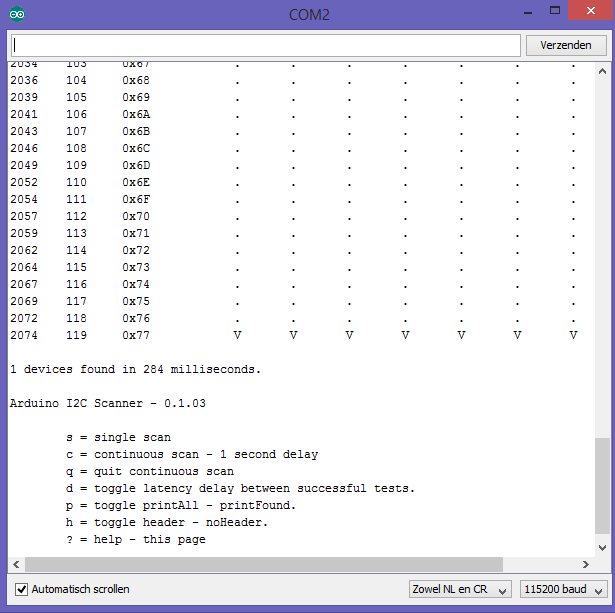
MultiSpeed I2C Scanner (Rob Tilaart) – 50,100,200,400 KHz
|
1 2 3 4 5 6 7 8 |
Arduino I2C Scanner s = single scan c = continuous scan - 1 second delay q = quit continuous scan d = toggle delay(5) between addresses. p = toggle printAll - printFound. h = toggle header - noHeader. ? = help - this page |
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 |
// // FILE: MultiSpeedI2CScanner.ino // AUTHOR: Rob Tillaart // VERSION: 0.1.04 // PURPOSE: I2C scanner @different speeds // DATE: 2013-11-05 // URL: http://forum.arduino.cc/index.php?topic=197360 // // Released to the public domain // #include <Wire.h> #include <Arduino.h> // scans devices from 50 to 800KHz I2C speeds. // lower than 50 is not possible // DS3231 RTC works on 800 KHz. TWBR = 2; (?) long speed[] = { 50, 100, 200, 250, 400, 500, 800 }; const int speeds = sizeof(speed)/sizeof(speed[0]); // DELAY BETWEEN TESTS #define RESTORE_LATENCY 5 // for delay between tests of found devices. bool delayFlag = false; // MINIMIZE OUTPUT bool printAll = true; bool header = true; // STATE MACHINE enum states { STOP, ONCE, CONT, HELP }; states state = STOP; uint32_t startScan; uint32_t stopScan; void setup() { Serial.begin(115200); Wire.begin(); displayHelp(); } void loop() { switch (getCommand()) { case 's': state = ONCE; break; case 'c': state = CONT; break; case 'd': delayFlag = !delayFlag; Serial.print(F("<delay=")); Serial.println(delayFlag?F("5>"):F("0>")); break; case 'e': // eeprom test TODO break; case 'h': header = !header; Serial.print(F("<header=")); Serial.println(header?F("yes>"):F("no>")); break; case '?': state = HELP; break; case 'p': printAll = !printAll; Serial.print(F("<print=")); Serial.println(printAll?F("all>"):F("found>")); break; case 'q': state = HELP; break; default: break; } switch(state) { case ONCE: I2Cscan(); state = HELP; break; case CONT: I2Cscan(); delay(1000); break; case HELP: displayHelp(); state = STOP; break; case STOP: break; default: // ignore all non commands break; } } char getCommand() { char c = '\0'; if (Serial.available()) { c = Serial.read(); } return c; } void displayHelp() { Serial.println(F("\nArduino I2C Scanner - 0.1.03\n")); Serial.println(F("\ts = single scan")); Serial.println(F("\tc = continuous scan - 1 second delay")); Serial.println(F("\tq = quit continuous scan")); Serial.println(F("\td = toggle latency delay between successful tests.")); Serial.println(F("\tp = toggle printAll - printFound.")); Serial.println(F("\th = toggle header - noHeader.")); Serial.println(F("\t? = help - this page")); Serial.println(); } void I2Cscan() { startScan = millis(); uint8_t count = 0; if (header) { Serial.print(F("TIME\tDEC\tHEX\t")); for (uint8_t s = 0; s < speeds; s++) { Serial.print(F("\t")); Serial.print(speed[s]); } Serial.println(F("\t[KHz]")); for (uint8_t s = 0; s < speeds + 5; s++) { Serial.print(F("--------")); } Serial.println(); } // TEST // 0.1.04: tests only address range 8..120 // -------------------------------------------- // Address R/W Bit Description // 0000 000 0 General call address // 0000 000 1 START byte // 0000 001 X CBUS address // 0000 010 X reserved - different bus format // 0000 011 X reserved - future purposes // 0000 1XX X High Speed master code // 1111 1XX X reserved - future purposes // 1111 0XX X 10-bit slave addressing for (uint8_t address = 8; address < 120; address++) { bool printLine = printAll; bool found[speeds]; bool fnd = false; for (uint8_t s = 0; s < speeds ; s++) { TWBR = (F_CPU/(speed[s]*1000) - 16)/2; Wire.beginTransmission (address); found[s] = (Wire.endTransmission () == 0); fnd |= found[s]; // give device 5 millis if (fnd && delayFlag) delay(RESTORE_LATENCY); } if (fnd) count++; printLine |= fnd; if (printLine) { Serial.print(millis()); Serial.print(F("\t")); Serial.print(address, DEC); Serial.print(F("\t0x")); Serial.print(address, HEX); Serial.print(F("\t")); for (uint8_t s = 0; s < speeds ; s++) { Serial.print(F("\t")); Serial.print(found[s]? F("V"):F(".")); } Serial.println(); } } stopScan = millis(); if (header) { Serial.println(); Serial.print(count); Serial.print(F(" devices found in ")); Serial.print(stopScan - startScan); Serial.println(F(" milliseconds.")); } } |